I.- NOCIONES GENERALES
Elementos de Máquinas (Recuperado Prezi de https://prezi.com/nsf3cvjowyui/elementos-de-las-maquina/)
1.- CONCEPTOS BÁSICOS.
1.1.- Elemento de Máquinas, organos, piezas o componentes.
Toda maquinaria o mecanismo, desde el más simple al más complejo, está formado por piezas o elementos de máquina unidas entre si de tal manera que pueden estar fijos o moverse unos con respecto a otros.
Elemento es la unidad fundamental en la construcción de máquinas, por ejemplo una tuerca, un eje, un engranaje, un cojinete, etc., por analogía podemos imaginarla como una célula de un organismo vivo.

Figura 1.1. Diversos elementos que se utilizan en maquinaria (1) resorte de compresión, (2) pin, (3) arandela o volanda, (4) perno, (5) tuerca, (6) y (7) cojinetes, (8) dedo actuante, (9) resorte de torsión, (12) chumacera, (14) dedo actuante, (15) tornillo, (16) tuerca seguro, (17) resorte.
Partes del motor a Gasolina (Recuperado de https://youtu.be/kZbKQFotLf0)
Partes de un motor de combustión interna (Recuperado de https://youtu.be/HjUaQ4naBBg)
MOTOR: PARTES FIJAS Y MOVILES (Recuperado de https://youtu.be/5B_vABj0nOg)
Ver: Elementos del sistema de distribución de un motor de combustión interna.
1.2.- Concepto general de Mecanismos.
Mecanismo (Recuperado de: https://youtu.be/eWL-9nD16Gk)
Mecanismos y Levas (Recuperado de https://youtu.be/7DeCr_VS4ao)
Es un conjunto de elementos, conectados entre sí por medio de articulaciones móviles y cuya misión es:
Transformar una velocidad en otra velocidad
Transformar una fuerza en otra fuerza
Transformar una trayectoria en otra diferente o
Transformar un tipo de energía en otro tipo distinto.
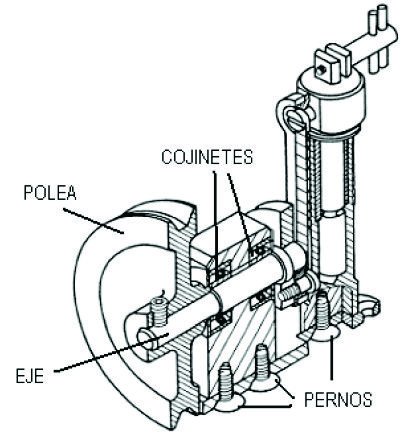
Figura 1.2. Vista de la sección de un mecanismo compuesto por ejes, pernos, polea, cojinetes, etc.
1.3.- Máquina o Sistema Mecánico.
Sistema Mecánico (Recuperado de https://youtu.be/LO4FVB3nHNE)
Un sistema mecánico o máquina es un aparato formado por una combinación de unidades interrelacionadas, que modifica movimientos, trayectorias, fuerzas o energías mediante una serie de transformaciones intermedias, por ejemplo una enfardadora, una sembradora, un molino de discos, una motosierra, un cargador frontal, una motoniveladora, un camión, etc.
Las partes interrelacionadas a las cuales hace referencia la definición a veces también se conocen en este contexto como elementos de máquinas. La idea de trabajo útil es fundamental a la función de una máquina, ya que en ello casi siempre habrá alguna transferencia de energía. La mención de fuerzas y movimiento también es vital para nuestros intereses ya que, al convertir la energía de una forma a otra, las máquinas crean movimiento y generan fuerzas. Es la tarea del ingeniero definir y calcular movimientos, fuerzas y cambios de energía a fin de determinar el tamaño, las formas y los materiales necesarios para cada uno de los componentes interrelacionados de la máquina.

Figura 1.3. Sembradora de granos finos, ejemplo de máquina.
Los movimientos que puede describir un elemento de un mecanismo son:
Movimiento rectilíneo: en un único sentido.
Movimiento alternativo: o movimiento de vaivén.
Moviendo circular o de rotación.
1.4.- Nociones de Máquina y mecanismos
"Introducción a Mecanismos, pares cinemáticos, grados de libertad, inversiones cinemáticas." (Recuperado de https://youtu.be/uKej9tyu2KQ)
La idea de mecanismo y máquina si bien puede ser clara a simple vista desde un punto de vista netamente intuitivo o pragmático, muchas veces trae aparejadas algunas confusiones. Para ello se introducirán unas definiciones primeras para fijar las ideas y/o conceptos involucrados en las máquinas y los mecanismos, como se muestra en el siguiente gráfico (Fig.2.0).
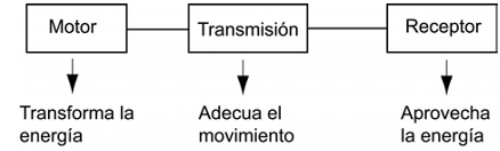
Fig. 2.0
1.4.1.- Definición de Máquina: Conjunto de cuerpos resistentes, unidos entre sí, entre los cuales se establecen determinados movimientos relativos y cuya principal misión es transmitir fuerzas desde una fuente de potencia a otro sistema donde han de ser vencidas ciertas resistencias o desarrollar ciertas funciones mecánicas. Cuyo funcionamiento posibilita aprovechar, dirigir, regular o transformar energía o realizar un trabajo, mediante una serie de transformaciones intermedias.
En el siguiente esquema ya hablamos de sistemas e involucramos a lo correspondiente a soportes.
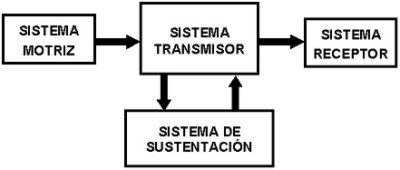
Fig. 2.1.- Esquema general de un sistema mecánico o máquina.
El esquema general del sistema mecánico puede refinarse más (figuras siguientes), así el sistema transmisor y el sistema de sustentación se pueden subdividir en otros sistemas (dentro de los cuales se ordenan los elementos componentes o partes de la máquina) y aparecen otros subsistemas que estrictamente no pertenecen a los sistemas transmisor o de sustentación pero que suelen ir asociados a la mayoría de las máquinas.
Fig. 2.2
Esquema ordenado de máquina:
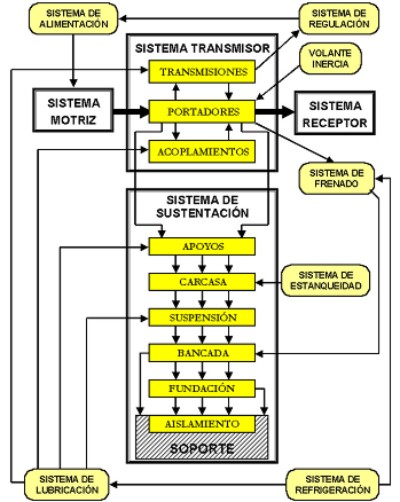
Fig. 2.3.- Esquema general desarrollado de un sistema mecánico o máquina.
Fig. 2.4
a).- Motor: Conversor mecánico que transforma otra energía (eléctrica, térmica, hidráulica, neumática) en energía mecánica. El de movimiento rotativo, es el más corriente (Motores rotativos), movimiento lineal (Motores lineales). Pero en sí un motor constituye una máquina por si mismo (por eso muchos autores dividen la máquinas: en máquinas Motoras o motrices y en máquinas operadoras o receptoras).
Fig. 2.5
* Tipos de motores rotativos:
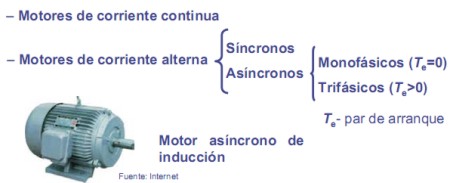
Motores eléctricos (los más empleados)
Fig. 2.6
Los más empleados en la maquinaria son los motores asíncronos (de inducción). El rotor está cortocircuitado (sin alimentación eléctrica) y acostumbra ser del tipo jaula de ardilla, con una construcción muy simple y un bajo mantenimiento.
Motores de combustión interna (sobre todo en vehículos)
Fig. 2.7
Turbinas de vapor o de agua (generadores de electricidad)
Motores hidráulicos y neumáticos (maquinaria de obras públicas)
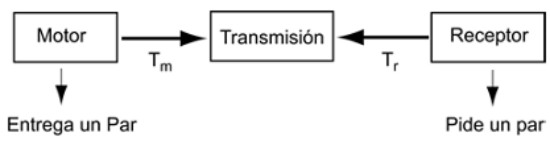
* El motor es un servidor del receptor y proporciona el par que se le pide, hasta un cierto límite.
Fig. 2.8
Par nominal de un motor: par que puede dar el motor de manera continuada sin que se produzca una rápida avería.
Capacidad de sobrecarga de un motor: capacidad del motor de soportar durante un tiempo un par resistivo de un valor mayor que el par nominal sin que se produzca una avería.
b).- Transmisión.- Adecua la forma en que el motor entrega potencia al receptor.
c).- Soporte.- Dado por el sistema de sustentación, que puede ser fija o móvil a un marco de referencia. Sirve para situar y fijar en ellas los mecanismos y los circuitos. Además soporta y transmite los pesos, las presiones o las vibraciones y protege y aísla las partes internas.
d).- Receptor.- Aprovecha la energía mecánica para la realización de la tarea dada.
e).- Circuitos.- Su función es controlar el flujo de la energía bien sea la que utiliza la máquina o la que transmite.

Ejemplo:

Fig. 2.9.- Conjunto Motor - Transmisión - Receptor
Máquina.- Compresor de pistones. Función comprimir aire.
Motor.- térmico (motor de combustión interna).
Transmisión; por engranajes (reductor de simple etapa).
Soporte; ver, esquema general desarrollado de un conjunto mecánico.
Receptor: compresor de aire.
1.4.2.- Clasificación de las máquinas.- Los clasificamos de acuerdo a las siguientes características mostrados en el gráfico:
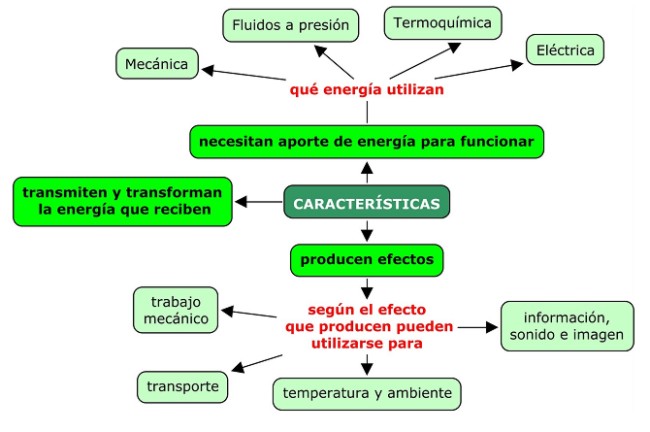
Fig. 2.11
Clasificación según los cambios realizados:
Máquinas energéticas.- Transforman las fuerzas naturales en energía técnicamente utilizable o un tipo de energía técnicamente utilizable en otro. Entre ellas figuran las máquinas de generación y de transformación de energía o máquinas motrices.
Ejemplos: motores de combustión, turbinas de gas, vapor e hidráulicas, máquinas de vapor, ruedas de viento e hidráulicas, generadores y transformadores.
Máquinas operadoras.- Entre ellas figuran todas las máquinas con las que se realiza en los materiales un cambio de forma, propiedades y estado. Se accionan mediante máquinas energéticas. Si su accionamiento se ejecuta mediante fuerza muscular se les llama instrumentos.
Con ellas se realiza un trabajo determinado. Las máquinas operadoras producen algo, elaboran o transportan piezas o materiales.Ejemplos: máquinas para el tratamiento de metales y madera, máquinas para plásticos, máquinas de construcción, máquinas de las industrias textil, tipográfica, papelera, de vidrios, de cerámica y de alimentos, máquinas agrícolas, automóviles, vehículos sobre rieles, equipos elevadores, ventiladores.
Máquinas de la informática.- Reciben, transmiten, procesan y almacenan información (datos).
Ejemplos: instalaciones radiotelegráficas y telefónicas, máquinas e instalaciones procesadoras de datos, computadores.
Clasificación según las características de las máquinas.
Todas las máquinas se pueden diferenciar según las características tecnológicas, funcionales y constructivas. Para establecer su clasificación, se deben analizar las características mencionadas de la máquina.
Dicho análisis permite comprender la función y la construcción de una máquina.Tabla 1.1. Clasificación de las máquinas según sus características
clasificación de las máquinas
tecnológica
funcional
constructiva
conversión de energía
parte energética
piezas
transformación de energía
parte operadora
componentes
transmutación de sustancias
grupos constructivos
transformación de materiales
sistema de unidades
transporte
normalizadas
procesamiento de información
máquina compuesta de unidades normalizadas
Clasificación según el principio de funcionamiento.
Las máquinas se clasifican según las leyes naturales y técnicas del proceso técnico de producción en el punto donde se realiza el trabajo útil.
Ejemplos: motores de combustión, máquinas de acabado con arranque de virutas, máquinas de transporte, de vapor, de elevación, electromaquinaria.
Clasificación según el objetivo de utilización.
Tabla 1.2. Clasificación de las máquinas según el objetivo de utilización
grupo:
máquinas - herramienta
máquinas de construcción
máquinas de transporte
subgrupo:
tornos
excavadoras
volquete trilateral
taladros
niveladoras
dumper
fresadoras
explanadora
camiones
rectificadoras
grúas
vehículos
giratorias de torre
sobre rieles
Nota.- Los elementos de máquina a estudiar serán de toda las máquinas con excepción la de informática.
Conclusiones:
Una máquina normalmente está compuesta por un motor, por una transmisión, por un receptor y por un soporte. El motor es un servidor del receptor.
Los motores rotativos son los más empleados en la práctica industrial y dentro de ellos los motores eléctricos trifásicos de jaula de ardilla, por resultar eficaz, robusto y requerir poco mantenimiento.
La caracterización del comportamiento mecánico de los motores y receptores se hace a través de su característica mecánica. En el caso de los motores dicha característica mecánica se determina a partir de los datos de las casas suministradoras.
Las características mecánicas de los receptores son diversas, dependen del tipo de receptor, de manera general se pueden incluir en cuatro tipos:
El par resistivo es independiente de la velocidad. Ejemplos: grúas, ascensores, escaleras mecánicas, una diferencia de presión constante (bombas volumétricas), etc.
El par crece linealmente con la velocidad. Este tipo de característica se da en generadores de corriente continua, y en receptores con resistencia de tipo viscoso, como mezcladores.
El par crece con el cuadrado de la velocidad. También conocida como característica ventilador, incluye máquinas como bombas centrífugas, hélices, etc.
El par decrece de forma no lineal con la velocidad. Ejemplos: accionamientos principales de tornos, fresadoras u otras máquinas herramientas o máquinas enrolladoras.
Las fases de funcionamiento de una máquina son tres: arranque, servicio y parada. La evolución del par resistente en la fase de servicio, puede ser constante, variable periódicamente (lo más habitual) o aleatoria.
1.4.3.- Fundamentos de mecanismos: :
Fundamentos de mecanismos (Recuperado de: https://youtu.be/ijMoxcDVFtY)
Un mecanismo es una parte mecánica de una máquina, cuya función es de transmitir movimiento y fuerza de una fuente de potencia a otra de salida, como se puede ver en el siguiente diagrama:
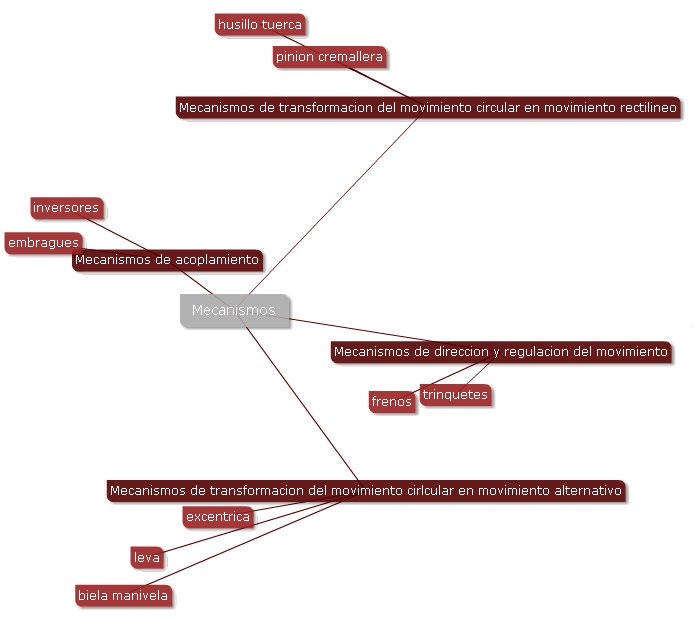
Diagrama 1.1
Según el número de elementos, los mecanismos se pueden clasificar como:
a.-Simples: si tienen dos elementos de enlace.
b.-Complejos: si tienen más de dos elementos de enlace.
Los mecanismos se pueden clasificar en dos grandes grupos diferenciados:
a.-Sistemas de transmisión del movimiento: En este caso el sistema motriz y el sistema receptor tienen el mismo tipo de movimiento. En base a esto, podemos encontrar dos tipos de sistemas de transmisión:
-
Mecanismos de transmisión lineal: movimiento rectilíneos en movimientos rectilíneos (poleas, palancas, etc).
-
Mecanismos de transmisión circular: movimientos de rotación en otra rotación (transmisión por correas, con cadenas, engranajes, )
b.-Sistemas de transformación del movimiento: En este caso el sistema motriz y el sistema receptor tienen distinto tipo de movimiento. En base a esto, podemos encontrar dos tipos de sistemas de transformación:
-
Mecanismos que transforman el movimiento circular en rectilíneo.
-
Mecanismos que transforman el movimiento circular en alternativo
1.4.4.- Definición de cadena cinemática: Se denomina cadena cinemática a la conexión de varios eslabones por medio de articulaciones de una forma muy definida sin que se establezca con claridad cual es el eslabón fijo. Una vez que se establece cual es el fijo, el nombre de cadena cinemática es reemplazado por el de mecanismo. En ocasiones los diseñadores suelen maquillar muy sutilmente el mecanismo para evitar su entendimiento y hasta la copia del mismo. Por ejemplo, la cadena de transmisión de un vehículo, el mecanismo pistón-biela-manivela, etc. Los miembros de una cadena cinemática se denominan eslabones.
-
Cadena cerrada o anillo. Cadena cinemática tal que cada uno sus miembros está enlazado nada más con dos miembros de la misma cadena.
-
Cadena abierta . Cadena cinemática que no tiene ningún anillo.

Fig. 2.12.- Cadenas cerradas y cadena abierta.
1.4.5.- Orden del eslabón: Es el número de nodos que contiene un eslabón (ver Fig. 1.13). Entonces los eslabones pueden ser BINARIOS (de dos nodos), TERNARIOS (de tres nodos), CUATERNARIOS (de cuatro nodos).
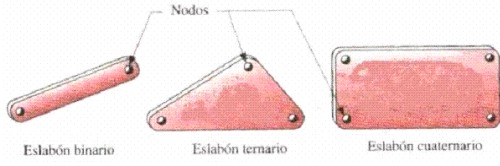
Fig. 2.13
1.4.6.- Definición de junta: una junta es una conexión entre dos o más eslabones efectuada por medio de sus nodos, la cual permite algún movimiento entre los eslabones. Las juntas se suelen llamar también como los pares cinemáticos. Existen diversos tipos y se pueden clasificar por:
Por el tipo de contacto entre los elementos: de línea, de punto (llamados también pares superiores) y de superficie (llamados también pares inferiores).
Por el número de grados de libertad (GDL) permitidos en la junta: juntas completas (1 GDL) y semi-juntas (2 y 3 GDL).
Por el tipo de cierre de la junta: de fuerza o de forma.
Por el número de eslabones conectados: orden de la junta..
En la Figura 2.14 se pueden apreciar diferentes tipos de juntas o pares cinemáticos, identificando los movimientos y grados de libertad que favorecen. Así pues, en la Figura 2.14.a se muestra una junta pasador de rotación, en la cual solo se tiene un grado de libertad de rotación. En la Figura 2.14.b se muestra una junta prismática, que solo tiene un grado de libertad en el sentido del movimiento. En la Figura 2.14.c se muestra una junta helicoidal que solo permite un grado de libertad de rotación, pero que posee dos movimientos, el de rotación y el de translación. En la Figura 2.14.d se muestra una junta cilíndrica, la cual permite dos grados de libertad y posee dos movimientos, el de rotación y el de translación. En la Figura 2.14.e se muestra una junta esférica, llamada también rótula, la cual permite tres grados de libertad de rotación. En la Figura 2.14.f se muestra una junta planar o junta en el plano, la cual permite tres grados de libertad con sus homónimos movimientos: dos de translación en el plano y uno de rotación.
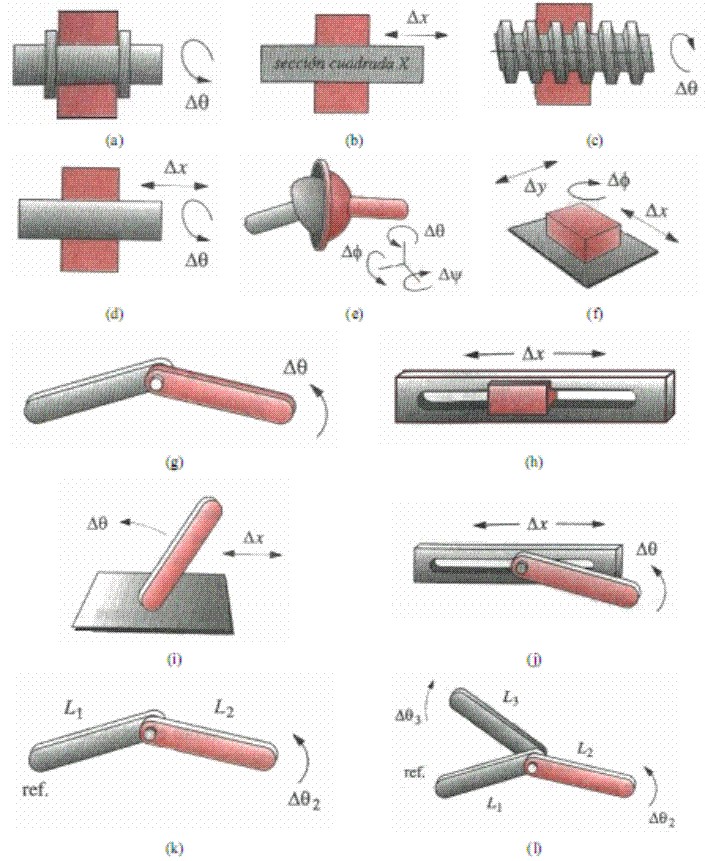
Fig. 2.14
En las Figuras 2.14.g y 2.14.h se muestran dos tipos de juntas completas o pares inferiores de un grado de libertad, mientras que en las Figuras 2.14.i y 2.14.j se muestran dos tipos de semi-juntas o pares superiores, que poseen dos grados de libertad cada una.
En las Figuras 2.14.k y 2.14.l se muestra el orden de las juntas (asociado a los grados de libertad que permiten) que es la cantidad de eslabones menos uno. Nótese que si el eslabón L1 tiene restringido su movimiento, en el caso de la Figura 2.14.k solo habrá un grado de libertad, mientras que en el caso de la Figura 2.14.l habrá dos grados de libertad disponibles.
En las Figuras 2.14.i y 2.14.j también se muestran ejemplos de juntas con cierre de forma y con cierre de fuerza. La junta con cierre de forma se mantiene unida o cerrada por virtud de su geometría, como en el caso del pasador en la ranura de la Figura 2.14.j. Por otro lado, en los casos de las juntas con cierre de fuerza, es una fuerza (ejecutada por un actuador, un resorte, etc) la que mantiene el contacto o el cierre de la cadena cinemática. Esto se podría ver en la Figura 2.14.i imponiendo una fuerza particular para mantener el contacto entre plano y varilla.
En las Figuras 2.14.k y 2.14.l se pueden apreciar juntas de diversos órdenes. Téngase presente que se define por orden de una junta o eslabonamiento a la cantidad de eslabones conectados menos uno. Así pues en las Figuras 2.14.k y 2.14.l tendremos juntas de primer orden y de segundo orden respectivamente.
Existen eslabones que por cumplir un fin determinado, reciben nombres específicos. Así pues:
- Manivela: Es un eslabón que efectúa una rotación completa con centro en uno de sus nodos y está pivotando respecto de un elemento fijo.
- Balancín: Es un eslabón que tiene una rotación oscilatoria (es decir de vaivén) pivotando con respecto a uno de sus nodos que es considerado fijo.
- Biela: Es un elemento de enlace que no tiene un movimiento de roto-translación y no pivota respecto de ningún punto fijo, si puede pivotar respecto a puntos (o nodos) en movimiento.
- Anclaje: (también llamado tierra o fijación) es el eslabón o grupo de eslabones que están sujetos en el espacio, es decir sin movimiento con respecto al marco de referencia. Nótese que el marco de referencia puede estar moviéndose o no.